Some pics of the bracket:
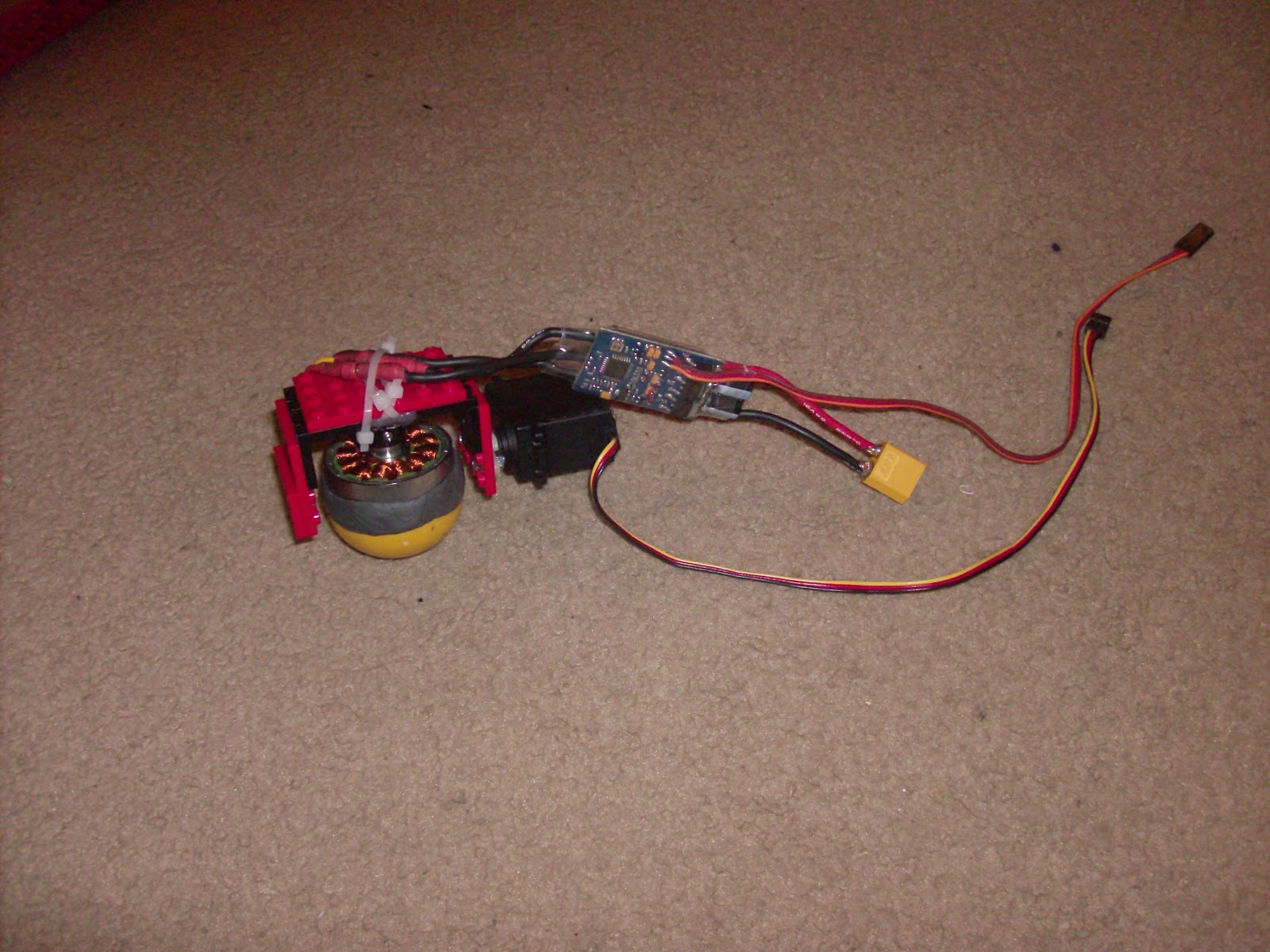


The gimbal that you see is for driving, and can move 180 degrees left and right. To steer, it will rase and lower it's rear wheels in tandem, causing a tilt of the whole bot to a "nose up or nose down" attitude. I sort of struggled on how to make the whole bot run, I have seen both a straight up 2 axis gimbal, and one bot that independantly rased or lowered each wheel to drive and steer. I chose the hybrid method because I wanted to have maximum travel latterally so that the whole hemisphere could be used for driving, and max top speed could be reached, and to do this with a regular gimbal would have been tough. I will not get max travel for steering, but really, I do not need to turn at 150 km/h, that is just a bit excessive... We will see how this system works for a first prototype.
No comments:
Post a Comment